Flying insects have developed effective strategies for navigating in natural environments. However, the experimental study of these strategies remains challenging due to the small size of insects and their high speed of motion: today it is only possible to study insects that are “tethered” or in stationary flight.
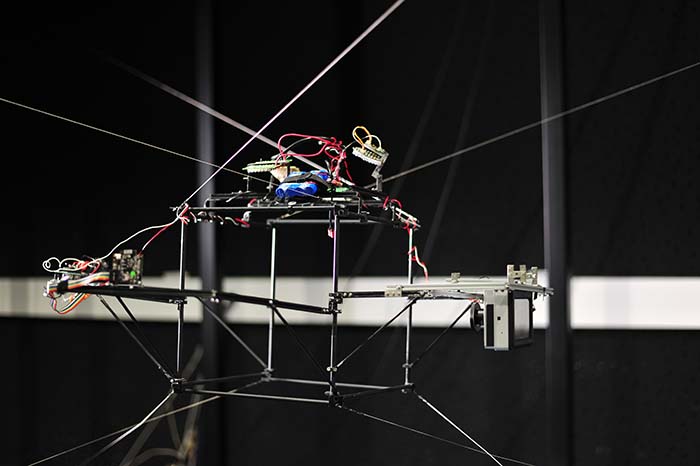
Scientists from the CNRS, Université de Lorraine, and Inrae(1) have developed the first cable-driven robot that can follow and interact with free-flying insects.
With the help of this “lab-on-cables,” which is equipped with cameras and a controller that minimizes tracking errors between the insect’s and the robot’s position, they successfully studied the free flight of moths (Agrotis ipsilon, approximately 2 cm long) up to a speed of 3 metres/second.
This research paves the way for tracking other insects such as fruit flies or mosquitos, and will help to better understand the orientation strategies used by these insects in response to olfactory or visual stimuli, among others. The results will be published in Science Robotics on 10 June, and will also appear on the cover.
See the robot in action:
Bibliography
Automatic tracking of free-flying insects using a cable-driven robot. Rémi Pannequin, Mélanie Jouaiti, Mohamed Boutayeb, Philippe Lucas and Dominique Martinez. Science Robotics, June, 10 2020. DOI : 10.1126/scirobotics.abb2890
Contact
CNRS Researcher l Dominique Martinezl T +33 6 37 33 34 72 l
CNRS Press l Alexiane Agullo l T +33 1 44 96 43 90 l
(1) Notes
At the Research Centre for Automatic Control in Nancy (CNRS/Université de Lorraine), the Lorraine Laboratory of Research in Computer Science and its Applications (CNRS/Université de Lorraine/Inria), and the Institute of Ecology and Environmental Sciences in Paris (CNRS/Sorbonne Université/UPEC/Inrae/IRD).
🔗 INRAE
🔗 CNRS
🔗 CNRS PARIS
🔗 Loria
🔗 Le Monde
🔗 Techniques ingénieur
🔗 Les Echos
🔗 RFI
🔗 Le Point





